定向鉆井井底鉆具組合(BHA)采用導向馬達執行滑動鉆進歷來是一項人工操作和依賴技能的作業。一直以來,該行業所采用的基本導向方法大致是:由定向司鉆(DD)負責計算所需鉆進的滑動進尺和目標方向,然后執行滑動,在此期間,還需控制鉆井參數,最終目的是優化鉆井績效。滑動質量(按所需方向調整工具面的時間占比來定義)以及滑動期間所獲得的鉆進表現很大程度上取決于DD的技能與現場經驗。
本文在此介紹另一種導向方法,該方法通過鉆機的控制系統,實現滑動導向控制和鉆井參數控制自動化操作,由司鉆負責滑動監管,確保定向作業獲得高質量的績效指標。利用這一工藝流程,將導向指令(計劃進尺和工具面控制指令)傳遞給鉆機的可編程控制器(PLC),然后,執行一組自動指令的序列:對齊或校準馬達工具面、將鉆頭下至井底、執行滑動鉆進、滑動結束時恢復或重啟旋轉鉆進。
這種導向自動化的現場測試表明,該方法可達到或超過DD所能達到的滑動質量的定向控制,而且,該方法是可重復的,性能表現具有充分的一致性,不依賴經驗監管即可獲得高性能指標。此外,這種導向方法是整個自動化鉆井工藝中的一個重要組成部分,其中,定向鉆井過程中的所有組成部分(定向指令的生成、滑動和旋轉鉆進的執行、鉆機各項活動或進程的管理)都是完全自動化的。
技術介紹
在過去的18個月里,一種自動滑動導向控制方法已成功得以開發,并在美國幾個主要陸上盆地的多部鉆機上實施了鉆井作業。作為鉆機控制系統的一個集成部分,該方法能自動執行將井底鉆具和鉆頭提離井底(滑動準備)以及將其置于井底(滑動執行)所有步驟全過程的動作操作,這些操作一并構成滑動鉆進。
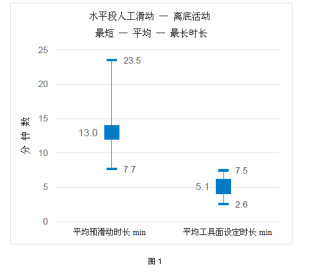
鉆頭離底的自動化主要指的是在滑動之前鉆頭提離井底后發生的所有的操作活動。例如,鉆頭離底后的其中一項關鍵操作就是將其下至井底執行滑動。置鉆頭于井底的關鍵操作又包括多個子操作,例如,在鉆頭吃入地層前輸入反扭矩以及根據壓差檢測井底狀態,這些都必須由控制系統來操控。離底作業的自動化對滑動鉆進過程的整體優化具有重要影響。在實施這項自動化技術之前和期間進行的人工滑動分析表明,各個井、各個井段和不同定向司鉆之間在鉆頭離底的時長方面存在著很大差異。一項對水平段進行的超過750次人工滑動的分析顯示,離底作業期間(預滑動或滑動準備的時長)平均為13min,其中最短的為7.7min,最長的為23.5min,見圖1給出的水平段離底時長的分析。這一巨大的差異可以通過滑動自動化方法有效的予以解決,可為石油公司或運營商節省大量的費用。
鉆頭在底的自動化主要指的是依據隨鉆測量(MWD)測得的工具面數據精準地執行滑動鉆進。鉆頭在底的核心操作必須是自動化的,其操作是利用工具面方位和其它地面測量數據,需要時可對工具面進行主動式和響應式調向修正,修正的幅度和頻率必須與工具面移動或偏離的量相匹配,這種修正相應地又會受到各種鉆井參數、地層類型、ROP和其它作業因素影響。
這種自動滑動方法的目標是提供一個“精準的滑動”,即馬達工具面與期望的方向始終對準,而不是自動控制autodriller。目前,autodriller鉆井參數(鉆壓、壓差、ROP設定點)的控制是由司鉆進行設定和執行的,而滑動控制自動化是通過收集autodriller設定點的變化而產生的參數變化進行控制的。例如,增大鉆壓會產生更大的壓差,這需要額外的反扭矩來保持工具面方向。這種職責分工(司鉆或DD對設定點進行控制、自動化系統對工具面進行控制)讓人專注于鉆井性能,也是無人操作的一個使能者。
數據與控制
為了有效地發揮作用,一個自動滑動系統必須具有與多種鉆機系統和數據源:鉆機頂驅、鉆機提升系統、地面鉆井參數測量數據、以及MWD工具面測量數據的功能鏈接(數據和命令的輸入與輸出)。
Ÿ 鉆機頂驅:為了使工具面與期望的方位對齊并保持一致,自動化系統必須能控制鉆機頂驅主軸探針的位置;
Ÿ 鉆機提升系統:為了松弛絞車剎車讓鉆頭觸及井底執行滑動鉆進,以及完成一次滑動鉆進后上提鉆具,自動化系統必須能控制鉆機的提升系統,例如絞車;
Ÿ 地面鉆井參數測量:控制系統必須能接收地面實測的壓差、鉆壓、扭矩和ROP等數據,以便對頂驅主軸探針的位置進行調整,保持工具面在期望的方向;
Ÿ MWD工具面測量數據:控制系統必須能實時接收MWD測得的工具面(磁工具面和重力工具面)數據,以便對頂驅主軸探針的位置進行調整,保持工具面在期望的方向。
由于這個自動滑動系統是在一部原始廠商鉆機(鉆機控制系統和鉆井綜合錄井儀已被集成于一體)的控制系統下實現的,因此,對鉆機系統而言,很容易實現所需數據和命令傳輸的集成。
導向方法
導向自動化方法意在采用反應式和主動式兩種導向算法來復制一名有豐富經驗的定向司鉆的導向表現。反應式導向邏輯是基于輸入的MWD工具面測量數據來實施導向;而主動式導向邏輯是基于觀察到的鉆井參數來實施導向的。
在這些導向算法中,每一種算法都擁有控制該系統行為的大量參數,這些控制參數須由該系統動態地進行調整,以確保導向算法得出準確且適用的指令。例如,當觀察到壓差增加時,系統必須輸入一個與反扭矩量值相對應的頂驅主軸探針位置的調整,以保持工具面在期望的方向。對于出現的增量壓差,探針位置調整的幅度將根據鉆具尺寸、壓差大小和其它鉆井參數的變化來調整,而且,這種調整必須被限定為能夠產生一個精確的導向響應。此外,該系統還必須考慮到有條件地改變導向響應的復雜性:例如,如果一個壓差的增加帶來的反扭矩會將工具面移向期望的方向,則無需采取動作。這些調整必須是建立在連續、實時的基礎上進行的,以實現有效的導向。最后,該系統必須在安全的前提下,在現有安全互鎖范圍內進行操作。
導向算法的選擇(反應式、主動式、或兩者兼有)以及決定算法表現的參數選擇很大程度上取決于井段(垂直段、造斜段/曲線段、水平段)的變化和所在井段的鉆井深度。為了便于靈活操作,這些參數被集成到一些被稱為“導向處方”的初始化文件中,當每口井將要鉆井時,不同的導向處方會被自動地加載(通常由某個井段的開始或某個井深所觸發),以保持最佳的導向效果。
滑動精度
滑動精度通常可以理解為在整個滑動過程中,導向馬達在期望的工具面方向上保持井眼軌跡連續性如何的一種測量。持續保持在期望方向上的滑動鉆進會使馬達打出更高的造斜率和鉆進效率,而精準度差的工具面控制,滑動效率會大幅降低,滑動進尺和井眼狗腿度可能會變化無常。從定向控制角度來看,滑動精度是馬達所鉆的進尺是否接近其預期應打的進尺以及各次滑動之間導向的連貫性和一致性是否良好兩項指標的綜合描述,使之能正確地確定后續滑動井段的進尺和工具面的方向。精確連貫的滑動進尺是減少井眼扭曲和做出更好定向決策的前提保障。
對于此項應用,應以三種衡量標準對滑動精度進行評價:滑動評分、工具面分布(工具面的變化)和廢進尺(Burn Footage燒掉的進尺)。滑動評分是一種通過計算進行的滑動評判,通過計算整個累積的滑動表現來表明實際的工具面控制與期望的工具面值的接近程度。滑動評分范圍從-100到100,-100是沿與預期方向正好相反的方向進行的滑動鉆進(例如以90°重力工具面的滑動,而不是270°的滑動);而100是完全沿預期的方向進行的滑動鉆進。這種衡量通常用來比較各次滑動精準度的表現,盡管對于井與井的比較可能是某個井段的平均值(例如造斜段/曲線段的平均滑動得分)。
工具面分布是一個圖形指示器,該指示器顯示了整個一個滑動鉆進井段的工具面控制精度。工具面控制被認為是“很好”(目標方向20°范圍內),“可接受的”(目標方向45°范圍內),或“差”(偏離或超過目標方向45°以上的)。繪制每個控制量程內滑動鉆進耗費的百分率占比可以快速準確的進行井與井之間和井段與井段之間的對比。圖2列舉了一個工具面分布,給出了該指示器的圖示說明。
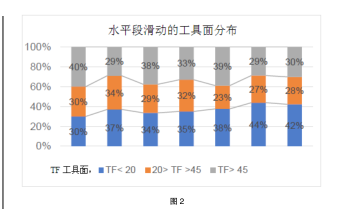
圖2中,每個豎條代表不同的井水平段范圍內工具面的分布,從這些數據中得出的一個可能的結論或許是:圖中右側更多的最近的井滑動鉆進工具面控制表現為“好”的占比有所增加,滑動鉆進工具面控制表現為“差”的占比有所減少。
廢進尺指的是以“差”的工具面控制(偏離目標方向45°以上)開始滑動的一種距離的度量。該指標可對每次滑動或多段滑動的平均值來進行評價,以便在井與井之間進行績效對比。開始一次工具面控制差的滑動是一種浪費精力作業,是一種未按期望方向變化進行的滑動鉆進,被視為是無績效的鉆進作業,因此,所打的進尺被視為是“廢進尺”。滑動開始后所打的大量的廢進尺需要定向司鉆再做導向進行滑動糾斜,以滿足要求的定向目標,這將導致更多的滑動時間。在與各種滑動速度標準聯系在一起進行評價時,從自動滑動系統的角度來看,廢進尺在評價是否“到達井底(go to bottom)”的邏輯時是有用的。結合滑動評分、工具面分布和廢進尺這三個衡量指標,可在每次滑動、每個滑動井段,或在每口井基礎上對滑動表現進行一個快速和有意義的評價。
滑動速度
與工具面控制精度一樣,滑動執行的速度對滑動成功與否同樣重要。如前所述,作為KPI的一個指標,在評價自動滑動系統時,由于該系統管控的不僅僅是井底的表現,ROP的快與慢也是一個重要指標。在與人工滑動相比較時,從預滑動時間的衡量中已觀察到有大量的節省。請注意,可能存在某些情況,對比一位定向司鉆和司鉆各自執行的一次滑動鉆進的ROP可從中獲得有價值的信息或啟示,這樣可以評價是否能夠減少作業人員。例如,確保減少人員的操作不會影響在底滑動鉆進的績效表現。利用三個績效指標來評價自動滑動的速度:累積的旋轉至旋轉或滑動至旋轉(RtR或StR)的時長;每次滑動的RtR或StR時長;以及滑動速度。
RtR和StR是執行一次滑動所需的總時長的度量。當一次滑動發生在同一立柱的兩個旋轉鉆進周期之間時,采用RtR,其時長開始于鉆頭從第一個旋轉周期結束后提離井底的那一時刻,而結束于鉆頭為執行第二個旋轉周期而返回井底的那一時刻,兩個時間之差為RtR的時長。StR是一種類似的度量,但其指的是發生在該立柱上部先前未進行過旋轉鉆進的那段立柱的滑動。StR的時長開始于司鉆退出滑動的那一時刻,而結束于滑動后鉆頭返回井底的那一時刻,這兩個時間之差為StR的時長。這些時長的度量包含所有的受滑動自動化或受定向司鉆影響的離底活動。RtR和StR的總時長被所執行的滑動次數所平均,為的是獲得每次滑動的RtR/StR的時長,這對跟蹤井與井之間的滑動效率以及尋找控制邏輯中是否存在改進的潛力是非常有幫助的。
最后,將各井段總的滑動進尺除以累計的RtR/StR時長得出滑動速度,即一種包含滑動前后離底時間的速度度量(ft/hr.)。在評價人工滑動或自動滑動的表現時,相比ROP的衡量,滑動成本的衡量則更加有用,因為它考慮了與滑動鉆進有關的所有的活動。檢查滑動過程中執行具體任務的持續時間——例如平均的預滑動時長或平均的工具面設定時長一定程度上可能是有用的。雖然這些時長是以RtR或StR時長的度量來考慮的,但具體地對其進行檢查可能會讓滑動處方得到改進。

 微信公眾號
微信公眾號
 微信視頻號
微信視頻號





 京公網安備11010502053156號
京公網安備11010502053156號